技能伝承を行うには、技を定義する要素を検討しそれを計測により記録する必要があります。計測された数値を目安とながら技を再現するよう仕向け技能を受け継ぐ事を2019年に考え実行することにしました。伝承する作業毎に何が重要な要素なのかを検討します。手作業による技能の記録を考え作業姿勢としての記録対象は、足の位置、足の屈曲、腰の位置・角度、頭の方向、目線方向、腕の形、手の位置などです。まず記録対象を絞り、腕や手の指先に注目することにします。既に姿勢はモーションキャプチャ技術により体の各部位の位置関係は把握できています。指の広がり具合や指の位置は、専用の指認識カメラの画像処理により識別する機能を開発済みです。したがって指の位置や形状より指先に加わる方向の検知は可能でした。あとは指先に加わる力を直接計測する装置が必要です。
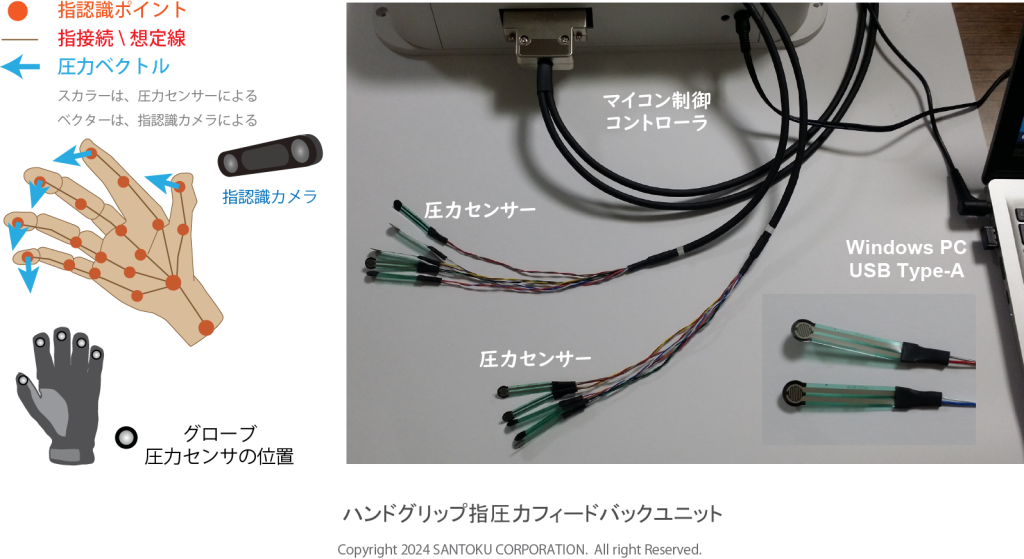
指先に加わる圧力を検知する為に、フィルム型の膜力感知抵抗方式の圧力センサーを指先腹に装着したグローブの開発を行いました。両手各指の圧力をリアルタイムに計測する為に、合計10ケの圧力を計測する制御系を設計しました。図はその圧力センサーとマイコン搭載の制御ユニットです。測定できる圧力は、0.2N-20Nです。圧力測定の制度を上げるために加重キャリブレーションも開発しましたが、センサー自体の測定バラつきが±2%です。センサの加重変化に対する感度特性は<3msecです。制御系の測定インターバルは、CPUとA/Dコンバータの性能で決まります。指に加わる圧力ベクトルは指の腹より垂直方向に発生すると暫定的に定義してソフトウエアを構築していますが、測定精度はモーショントラッキングの計測精度により決まってしまいます。機能の要素技術開発は一旦終わりましたが、この技術を使用しようとしていた手作業による機械部品の組み立て技術伝承プロジェクトが中止となった為、実用化はされませんでした。