RiMMの触覚再現グローブで再現した痛覚は、肌への電気放電を利用した痛覚再現です。労働災害は、切創災害、巻き込まれ災害、挟まれ災害、火傷災害など痛みを伴う現象が多い為、電気刺激とな異なる種類の痛さを再現しようと試みます。放電以外の方法で痛覚を再現する為にサーマルグリル錯覚の利用に注目します。サーマルグリル錯覚は、皮膚に温感と冷感を交互に連続的に印加する事により痛みを感じる錯覚現象です。この方式は、皮膚にダメージを与えない温度を利用し温感と冷感を交互に肌に印加する事で、痒みや痛みを感じさられる点が利点です。またサーマルグリル錯覚は、焼けるような痛みも生成できる可能性が有るとの想定で火傷災害などの再現に有効と判断しユニットの開発を始めます。
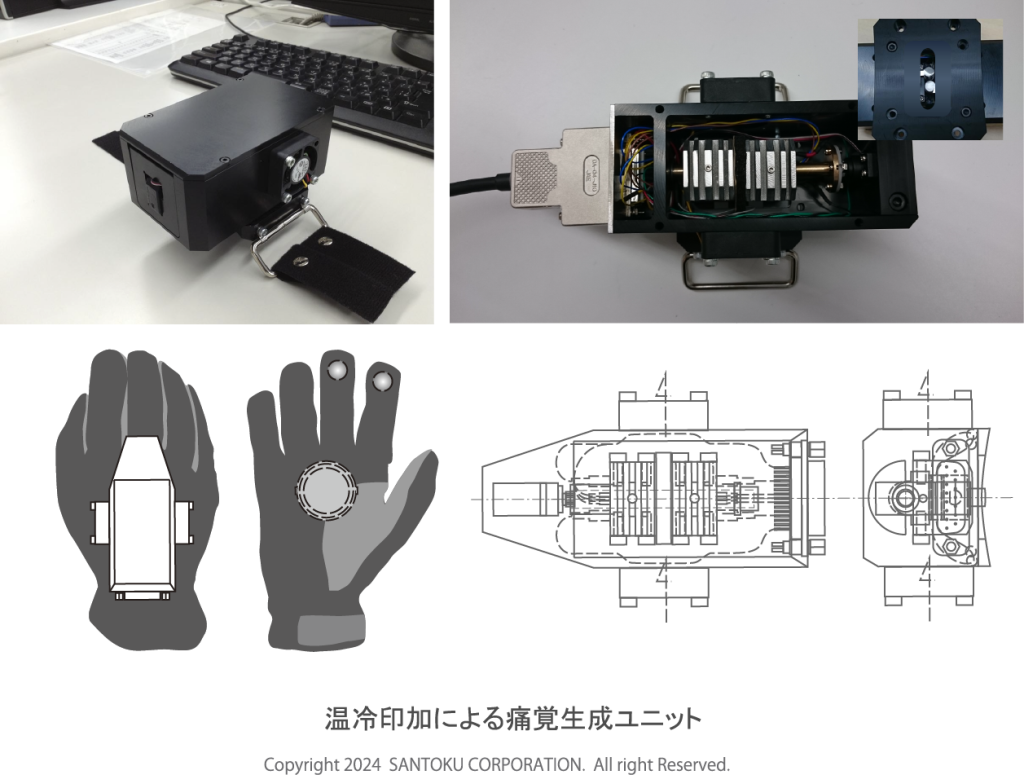
図に示すユニットは、2017年に開発したサーマルグリル錯覚を利用した痛覚再現装置のプロトタイプです。二つのペルチェ素子を使用し温度フィードバック制御により温感と冷感を作り出しています。ペルチェ素子は温度センサーによるフィードバック制御により電気を流しがら温度を制御します。ペルチェ素子が生成した熱はヒートシンクとファンにより外部より新鮮な空気を取り込み冷却すと同時に余分な熱は外部に放熱します。温感ゾーンと冷感ゾーンは温度伝達プローブを介して肌へ直接伝達する仕組みです。二つのプローブはサーボモータの軸線上に固定されています。モータによる連続した反転回転運動により肌に温感、冷感を交互に印加する仕組みです。この方法によりサーマルグリル錯覚を生成する仕組みは実現出来ましたが、運用上の障害が見つかります。障害の一つはユニット重量が重くなる点です。手の甲側に温冷を印加する事を考えていた為、重量の重さは体感に悪影響を与えます。もう一つの障害は、冷却側で10℃以下を再現する為に結露が発生します。これにより水滴の影響を無くす処置が必要になります。合わせてモータを搭載した複雑な機構は、製造現場の厳しい環境下で利用を考えると耐久性とメンテナンス性で懸念が大きく、これらを含めると量産する事が難しいとの判断で製品化を断念しました。
説明補足:サーマルグリル錯覚と表現されている通り、サーマルグリル錯覚による感覚は皮膚組織を破壊する際に発生する痛覚とは少し異なります。温冷感を交互に刺激する事によるこの感覚は、痛いの手前で痒さを感じる様な感覚です。本ユニットでの感覚再現は火傷を伴うよう温感刺激を与えているわけでは無いので、痛さを想わせる錯覚現象として考えてください。(2025年3月4日追記)