平衡感覚を生成するモーションベースは、2014年に開発をスタートしました。モーションベースを開発する目的は、墜落災害と地震災害を再現し安全に対処する訓練で利用する事を目的としてユニット開発を開始します。6自由度の再現が可能なモーションベースは、航空機や車両の運転シミュレータで既に存在していました。モーションベースは、油圧やサーボモータを利用し多大型のユニットが多く高性能な機能が搭載されコストが高く簡単には採用できない状況でした。従って機能を制限してでもコストを抑えたモーションベースの実現を目指します。低コストで移動が可能なユニットを実現する為に6自由度を諦め4自由度の上下動に限定したユニットの実現を目指します。構造が簡単な床下に大型バイブレータを設置し振動により模擬体感するユニットの実現を考え始めます。検討を続けると高出力の大型振動子が必要になり合わせて高出力の制御ユニットが必要となりコスト的に条件に合わない事が判明します。高出力の駆動ドライバーを4軸利用するので有ればサーボモータの利用も視野に入れながら設計作業を進めます。
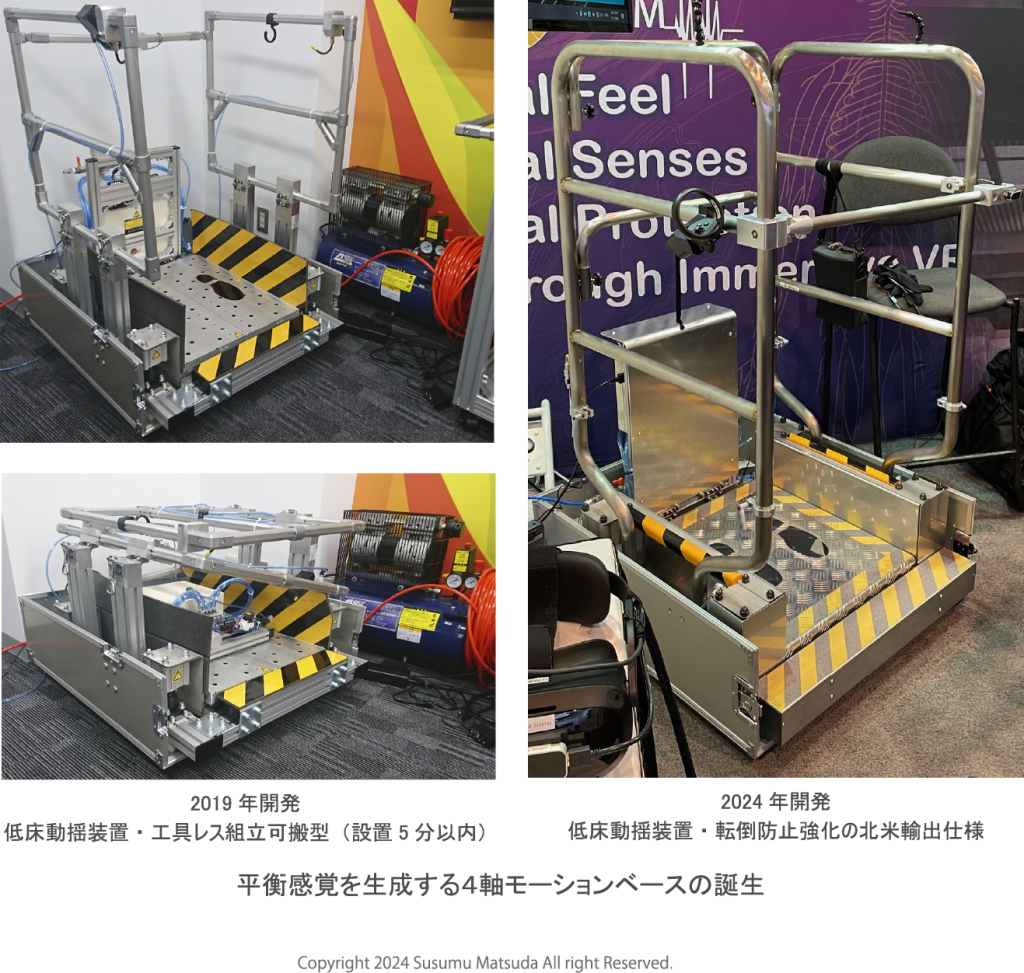
半導体の製造装置の設計で13年間の利用経験が有り、サーボモータのメリットとデメリットに関しては熟知していました。検討を続けると粉塵が舞う製造現場でのサーボの運用は難しい事、制御ユニットの故障発生率よりメンテナンスフリーは実現できない事、自然落下の高速動作を実現出来ない等、目的を達成できない事が判明します。製造現場の運用は非常に厳しい事とコストを考慮するとサーボモータの運用は断念します。長年使い慣れたサーボモータの採用を諦め構造が簡単で制御がシンプルなエアーを利用した駆動方式を採用します。エアーシリンダーの駆動であれば制御ユニットのコストは抑えられ、一定期間のメンテナンスフリーも実現できます。重力落下を再現する高速駆動と高出力駆動も実現できます。課題は動作パターンの可変駆動ですが、高機能を諦め2速度駆動に対応する為に、エアー2系統制御方式に挑戦し2段速度切り替え駆動の4軸モーションベースを実現します。エアー駆動方式によるモーションベースを5回に渡り設計改良を実施しながら10年以上独自のユニットを供給し続けています。2023年には北米での運用に対応したモーションベースも実現しています。RiMMのモーションベースは基本設計思想を維持したまま製品化され続けています。